
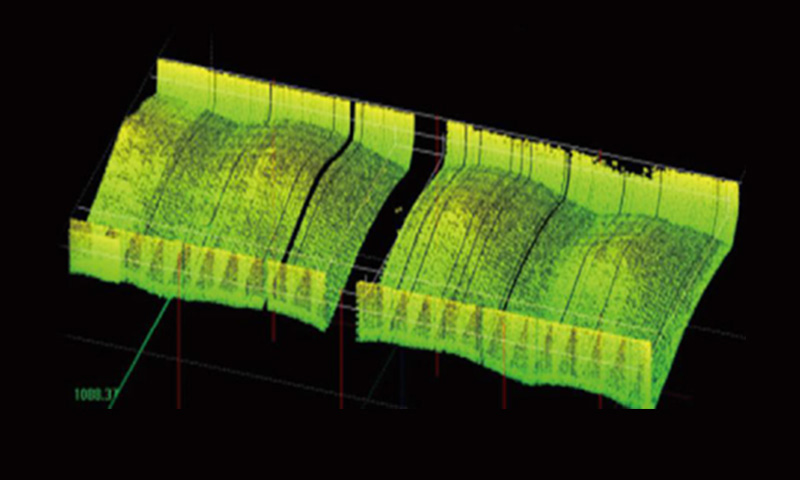
物料识别面临着:作业环境恶劣,粉尘较多,料仓中经常有积水的问题,常规的成像技术无法穿透此类“散状粉尘雾”,且会由于积水形成“黑洞吞噬”效应。盈泰利华采用脉冲高频电磁波技术,脉冲高频电磁波轻松穿透密集矿粉、水汽等高反射介质进行料堆三维扫描,为司机作业提供最佳的取料点位置,让司机拥有上帝之眼。找准最佳的取料点后,需要确保以下三点——
- 运行过程防摇
- 抓料满斗率
- 钢丝绳不脱槽
-
行车的抓斗会在行进过程中出现摇晃的情况,这时司机可以通过调整速度来消除摆动,但依旧无法完全规避。
-
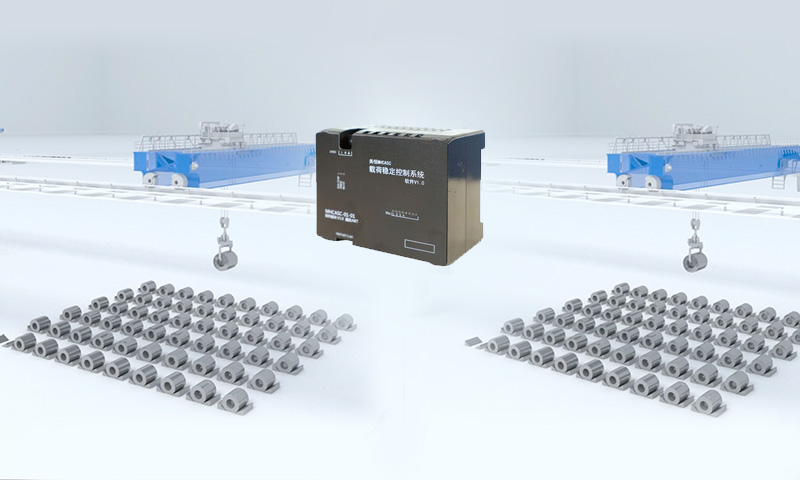
行车荷载稳定系统
盈泰利华自主研发的行车荷载稳定系统,只需将原大小车机构变为变频器总线控制,一次性输入算法参数,就能减少95%的摆动幅度,让静止后摆动幅度< 50mm。
-
抓斗垂直下落时,抓满斗是容易的,而当抓斗落在料堆的斜面上,抓满斗的难度会直线上升。
-
智能沉抓模型
盈泰利华通过智能沉抓模型,利用抓斗的自身重力下沉,确保抓斗在最大开合角度,通过对抓斗速度与力矩的控制,形成闭环控制,让钢丝绳处于紧绷与松弛的“临界点”,保证抓取物料的满斗率。

-
钢丝绳有着偏柔软的特性,在抓取物料的过程中,可能容易出现钢丝绳松弛而脱槽的状况。
-
电子脱槽监测单元
盈泰利华通过实时监测抓斗高度、重量、电流等参数,当抓斗着地时,保证开闭机构钢丝绳具有向上的力矩,避免抓斗钢丝绳处于“松弛”状态,进而避免钢丝绳脱槽。
吊取物料时,电子监测单元对钢丝绳的垂直状态进行监测,杜绝歪拉斜吊,电子脱槽监测单元会识别钢丝绳是否脱槽,并发生报警,保障作业安全。

-
行车的抓斗会在行进过程中出现摇晃的情况,这时司机可以通过调整速度来消除摆动,但依旧无法完全规避。
-
行车荷载稳定系统
盈泰利华自主研发的行车荷载稳定系统,只需将原大小车机构变为变频器总线控制,一次性输入算法参数,就能减少95%的摆动幅度,让静止后摆动幅度< 50mm。
-
抓斗垂直下落时,抓满斗是容易的,而当抓斗落在料堆的斜面上,抓满斗的难度会直线上升。
-
智能沉抓模型
盈泰利华通过智能沉抓模型,利用抓斗的自身重力下沉,确保抓斗在最大开合角度,通过对抓斗速度与力矩的控制,形成闭环控制,让钢丝绳处于紧绷与松弛的“临界点”,保证抓取物料的满斗率。
-
钢丝绳有着偏柔软的特性,在抓取物料的过程中,可能容易出现钢丝绳松弛而脱槽的状况。
-
电子脱槽监测单元
盈泰利华通过实时监测抓斗高度、重量、电流等参数,当抓斗着地时,保证开闭机构钢丝绳具有向上的力矩,避免抓斗钢丝绳处于“松弛”状态,进而避免钢丝绳脱槽。
吊取物料时,电子监测单元对钢丝绳的垂直状态进行监测,杜绝歪拉斜吊,电子脱槽监测单元会识别钢丝绳是否脱槽,并发生报警,保障作业安全。

-
解决方案
-
产品创新
-
核心技术
-
关于我们
-
Contact Us
sales1@intellicrane.com-

微信公众号
-

客户服务号
-