
2D识别维度:颜色、图形、字符、位置等;
主要作用:定位、识别、测量、检测。
- 图像识别
- 目标检测
- 实例分割
-
图像识别是深度学习在视觉中的基础应用之一,它的主要任务是确定给定图像中的主要内容。在实现过程中,这些网络可以学习到从简单到复杂的一系列视觉特征,进而对输入图像进行分类。
-
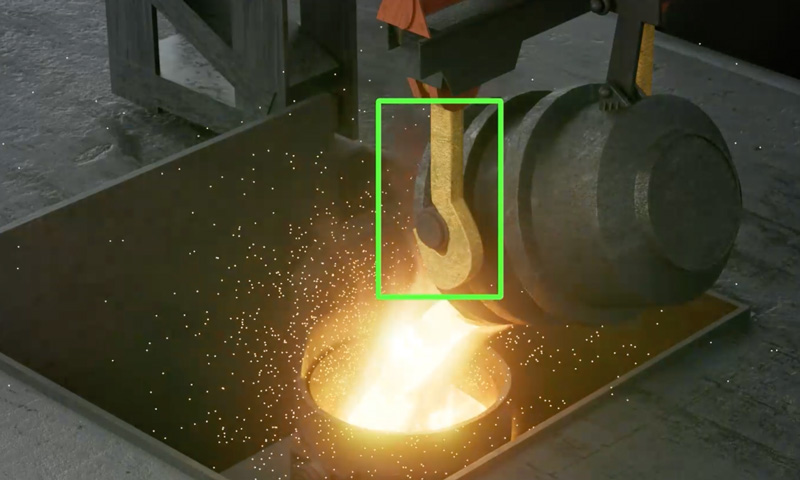
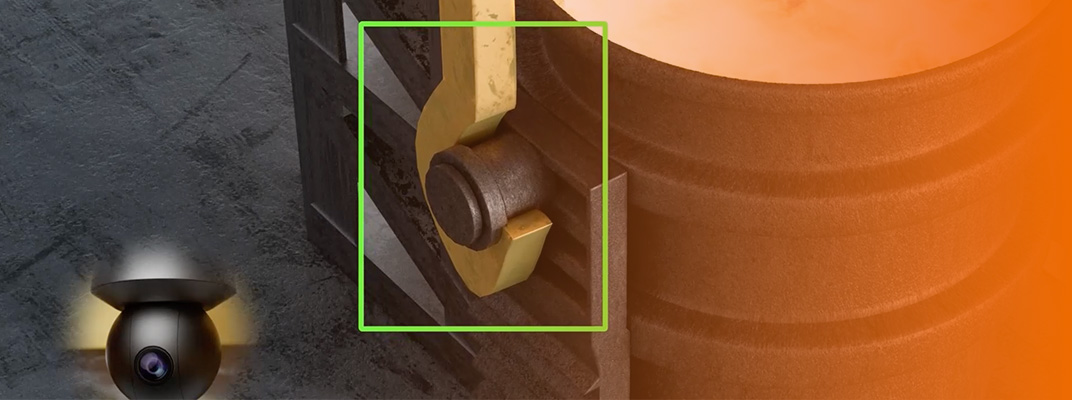
目标检测不仅需要识别图像中的物体类别,还要确定物体在图像中的具体位置。这系列算法通常会生成一系列候选框,然后对每个候选框内的物体进行分类,并优化候选框的位置和大小,以实现对物体的精确定位。
-
实例分割则是目标检测的延伸,不仅需要确定每个物体的位置,还要对物体的每个像素进行识别,从而获取物体的精确轮廓。这类算法在目标检测的基础上,额外加入一个分割分支,对每个检测到的物体进行像素级的分割。
-
图像识别是深度学习在视觉中的基础应用之一,它的主要任务是确定给定图像中的主要内容。在实现过程中,这些网络可以学习到从简单到复杂的一系列视觉特征,进而对输入图像进行分类。
-
目标检测不仅需要识别图像中的物体类别,还要确定物体在图像中的具体位置。这系列算法通常会生成一系列候选框,然后对每个候选框内的物体进行分类,并优化候选框的位置和大小,以实现对物体的精确定位。
-
实例分割则是目标检测的延伸,不仅需要确定每个物体的位置,还要对物体的每个像素进行识别,从而获取物体的精确轮廓。这类算法在目标检测的基础上,额外加入一个分割分支,对每个检测到的物体进行像素级的分割。
- 滤波
- 特征提取
- 聚类算法
- 定位
-
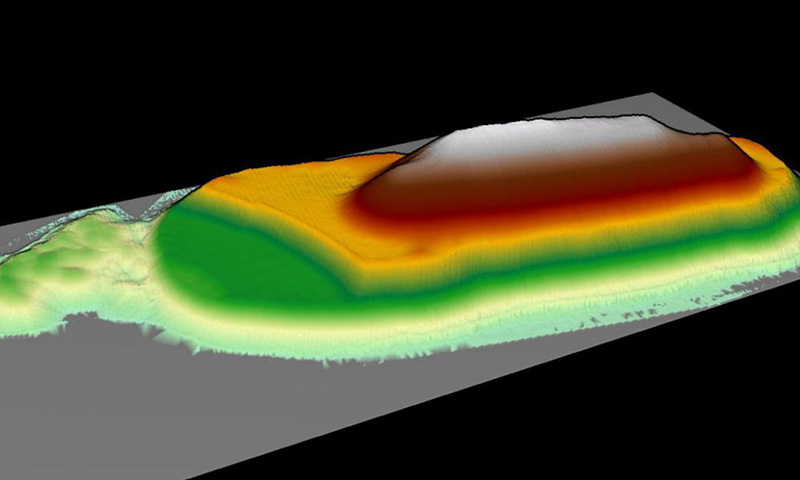
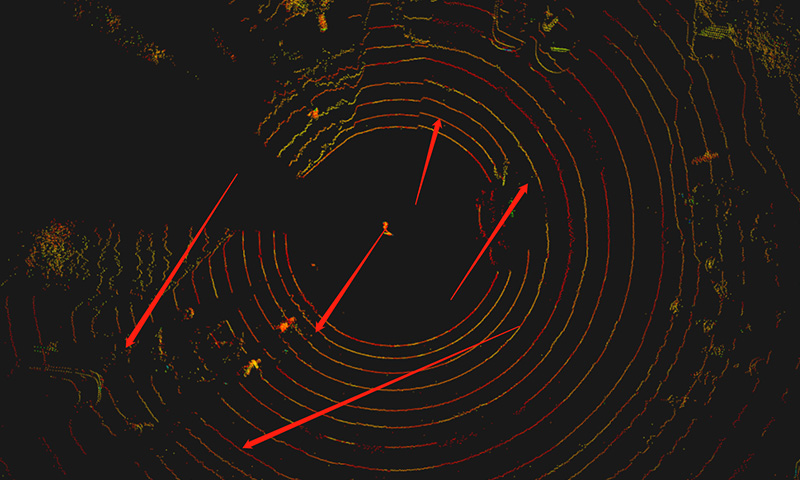
滤波是点云处理的重要前期步骤。滤波可以去除噪声,提高数据质量,常见的方法有体素栅格滤波(Voxel Grid Filter)用于降采样,统计滤波(Statistical Outlier Removal)用于移除离群点等。经过滤波处理后,可以减少点云的数据量,并消除误差和噪声。
-
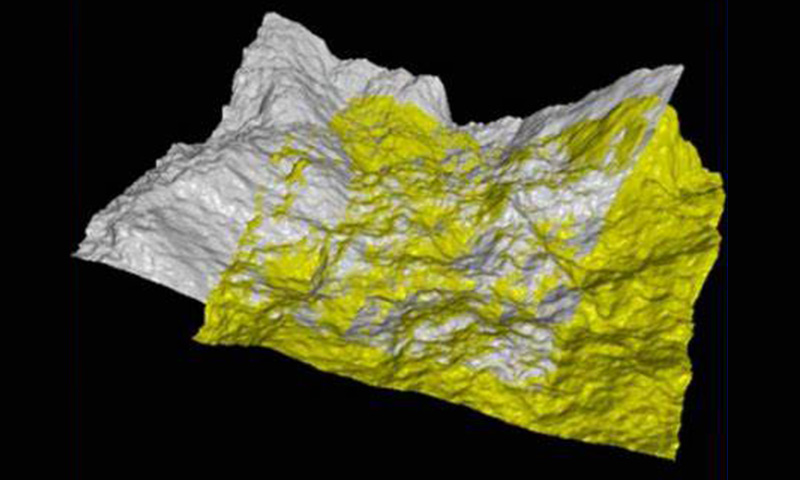
特征提取在点云处理中非常关键,它能够为点云的识别、配准、聚类等提供基础。在PCL库中,提供了多种特征提取方法,如Normal Estimation用于估计点云的法线,FPFH(Fast Point Feature Histograms)和SHOT(Signature of Histograms of Orientations)用于提取点云的描述符等。

-
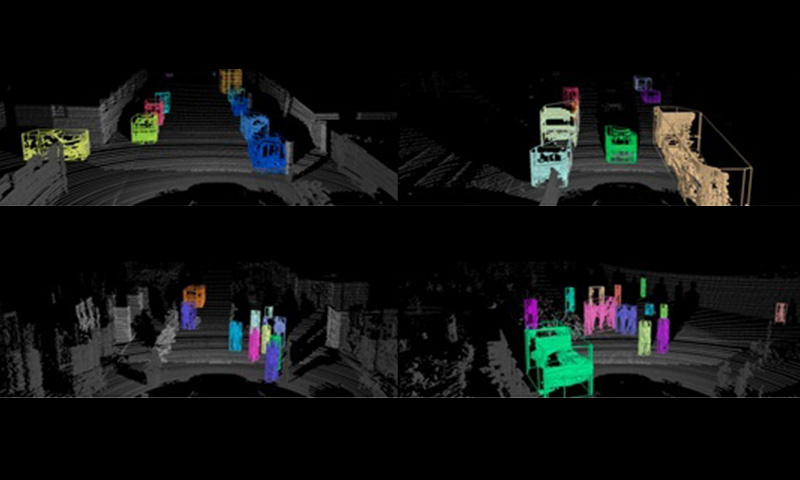
聚类算法用于将点云中的点划分为多个群组,通常基于点间的距离或者密度。PCL库中提供的聚类算法有K-means、DBSCAN和Euclidean Cluster Extraction等,这些算法能够实现点云中的物体分割和识别。

-
定位则是通过点云的特征匹配或模型拟合实现。PCL中提供了多种配准方法,如ICP(Iterative Closest Point)和NDT(Normal Distribution Transform)等,这些算法可以用于计算点云之间的空间变换关系,实现机器人或传感器的定位。
-
滤波是点云处理的重要前期步骤。滤波可以去除噪声,提高数据质量,常见的方法有体素栅格滤波(Voxel Grid Filter)用于降采样,统计滤波(Statistical Outlier Removal)用于移除离群点等。经过滤波处理后,可以减少点云的数据量,并消除误差和噪声。
-
特征提取在点云处理中非常关键,它能够为点云的识别、配准、聚类等提供基础。在PCL库中,提供了多种特征提取方法,如Normal Estimation用于估计点云的法线,FPFH(Fast Point Feature Histograms)和SHOT(Signature of Histograms of Orientations)用于提取点云的描述符等。
-
聚类算法用于将点云中的点划分为多个群组,通常基于点间的距离或者密度。PCL库中提供的聚类算法有K-means、DBSCAN和Euclidean Cluster Extraction等,这些算法能够实现点云中的物体分割和识别。
-
定位则是通过点云的特征匹配或模型拟合实现。PCL中提供了多种配准方法,如ICP(Iterative Closest Point)和NDT(Normal Distribution Transform)等,这些算法可以用于计算点云之间的空间变换关系,实现机器人或传感器的定位。


-
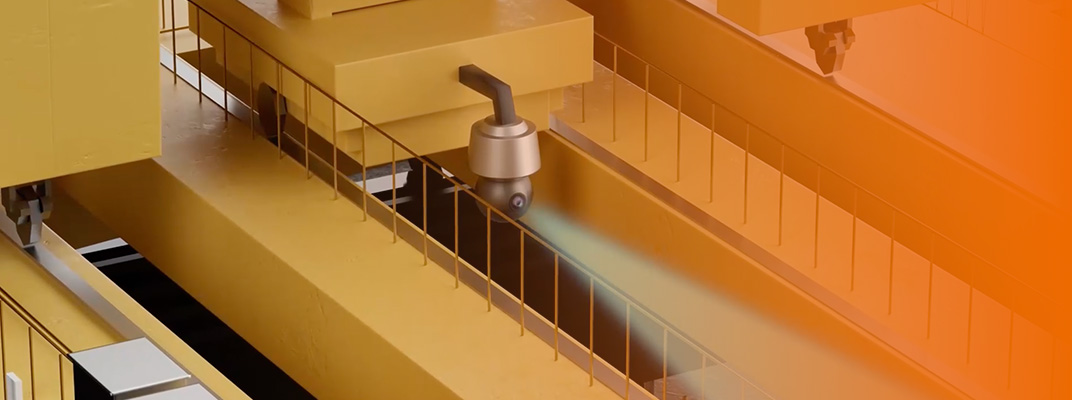
解决方案
-
产品创新
-
核心技术
-
关于我们
-
Contact Us
sales1@intellicrane.com-

微信公众号
-

客户服务号
-